One of the UAS used in Purdue's UAS program is the C-Astral Bramor PPX. This is a flying wing vehicle that is used for surveying and mapping. Students in the UAS program will eventually be trained to use the Bramor PPX, so it is important that they are familiar with it.
 |
| A Bramor PPX sitting on the catapult before launch. |
Before getting into the operations, users need to know the specs of the vehicle as well as what it is used with. The Bramor PPX has a wingspan of seven feet, a max takeoff weight of 10.8 pounds, and a total endurance of 3 hours. It has two interchangeable sensors and one sensor that is not interchangeable. The interchangeable sensors are the Sony RX1 RII and the Altum Multi-spectral sensors. The sensor that is not interchangeable is the PPK GPS sensor. This sensor records accurate GPS data. One thing to note is that images taken during flight do not automatically have geolocation information attached to them. The photos and GPS data must be put together after the flight. During flight, the autopilot keeps a log of when images and GPS coordinates are taken. Operators must make sure that the images and GPS coordinates are being recorded properly otherwise adding the GPS data to the images afterwards will be much more difficult.
 |
| The Altum Multi-spectral sensor has 5 multi-spectral bands. |
 |
| The Sony RX1 RII has a 35 mm lens and takes photos at 42 MP |
Another important part of using the Bramor PPX is understanding the flight planning software. The software used for this UAS is CP3, which is also made by C-Astral. CP3 is used to create and run the missions that the Bramor is being used for. When creating a flight plan, there are five waypoints that need to be set. These points are the home point, the takeoff point, the rally point, the landing point, and the parachute point.
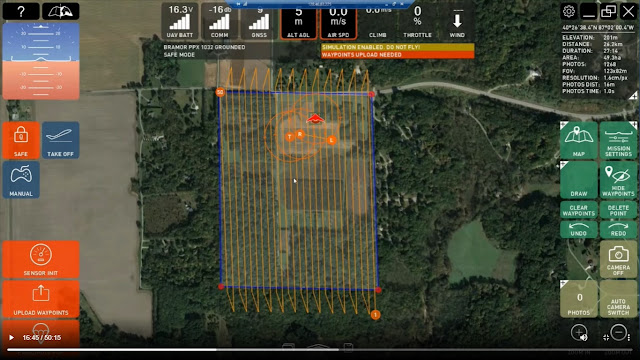 |
| This is what CP3 looks like. The circles are the home, takeoff, rally, landing, and parachute points. The blue box is the mission area and the yellow lines show the flight path. |
Once all these points are set, the mission points still need to be set. Creating a flight plan is easy with CP3. To set the mission area, make four points. This will create a box and show the path that the UAS will take. Mission area, flight path, and many more things can be configured in CP3.
Another thing that must be checked before every flight is the fail-safe tab. This shows the operator what fail-safes are enabled and what the vehicle will do in certain fail-safe situations.
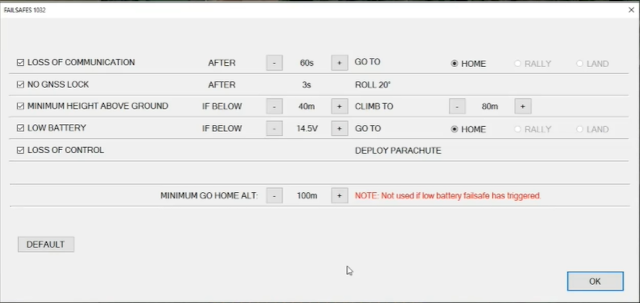 |
| This is the fail-safe tab. Some of the fail-safes are configurable while 'Loss of Control' and 'No GNSS Lock' are non-configurable. |
There are some cool things that can be done with CP3 too. Users can view the flight plan in 3D using Google Earth. This is useful because the operator can see the flight plan in a more realistic way which helps with planning. CP3 also allows the user to simulate their flight plan. This can be used to check that the UAS will follow the flight plan as intended and that there will be no errors. All units of measurement can also be configured through the settings in CP3. Overall this flight software provides a lot of data.
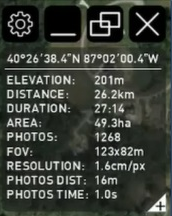 |
| This is one of the boxes that appears in CP3. This box provides a lot of information about the mission such as how long it will take to complete the mission or how many photos will be taken. |
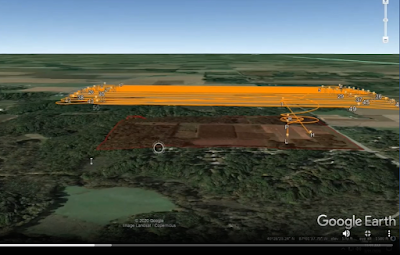 |
| This is what the 3D view of the mission plan looks like. |
One last thing that must be done before flying the Bramor PPX is completing the checklist. This is divided into two checklists: one for the vehicle and one for the sensors. It is important that the vehicle can be operated safely and that the sensor is operating correctly so the checklist is very crucial to operation.
Once the checklist is completed, operation may begin. The Bramor PPX crew consists of at least three people: the pilot-in-command, the first officer, and the sensor operator. There may also be an amount of visual observers on the mission to keep eyes on the UAS. The PIC is operating the vehicle and needs to ensure safe operation. The sensor operator will be operating the sensors. Both the PIC and the SO also have to complete their respective checklists. The first officer is there to communicate between the PIC and the visual observers. They also help with the checklist as well as tear-down at the end of the mission.
During flight, there are only a few things the operator can select: manual, loiter, navigate, rally, home, and land. All of these can be used in different situations. For example, in emergency situations the users can call tell the vehicle to come home or land. If none of these modes are selected than the UAS will begin its mission. Once the mission is completed the vehicle will fly to the landing point and begin the landing procedure. The Bramor PPX lands by deploying a parachute and slowly gliding to the ground. Because it uses a parachute and cannot hover, the landing point must be chosen carefully. Once the vehicle lands, the parachute must be folded again. It is crucial that the parachute is folded correctly as an incorrectly folded parachute will result in damage to the vehicle. Operating the Bramor requires a lot of things to be done correctly. This is why students need to be familiar with the vehicle and get properly trained with everything before they can be on the flight crew.








Comments
Post a Comment